
Endoscopic capsule navigation achieved by magnetic coupling
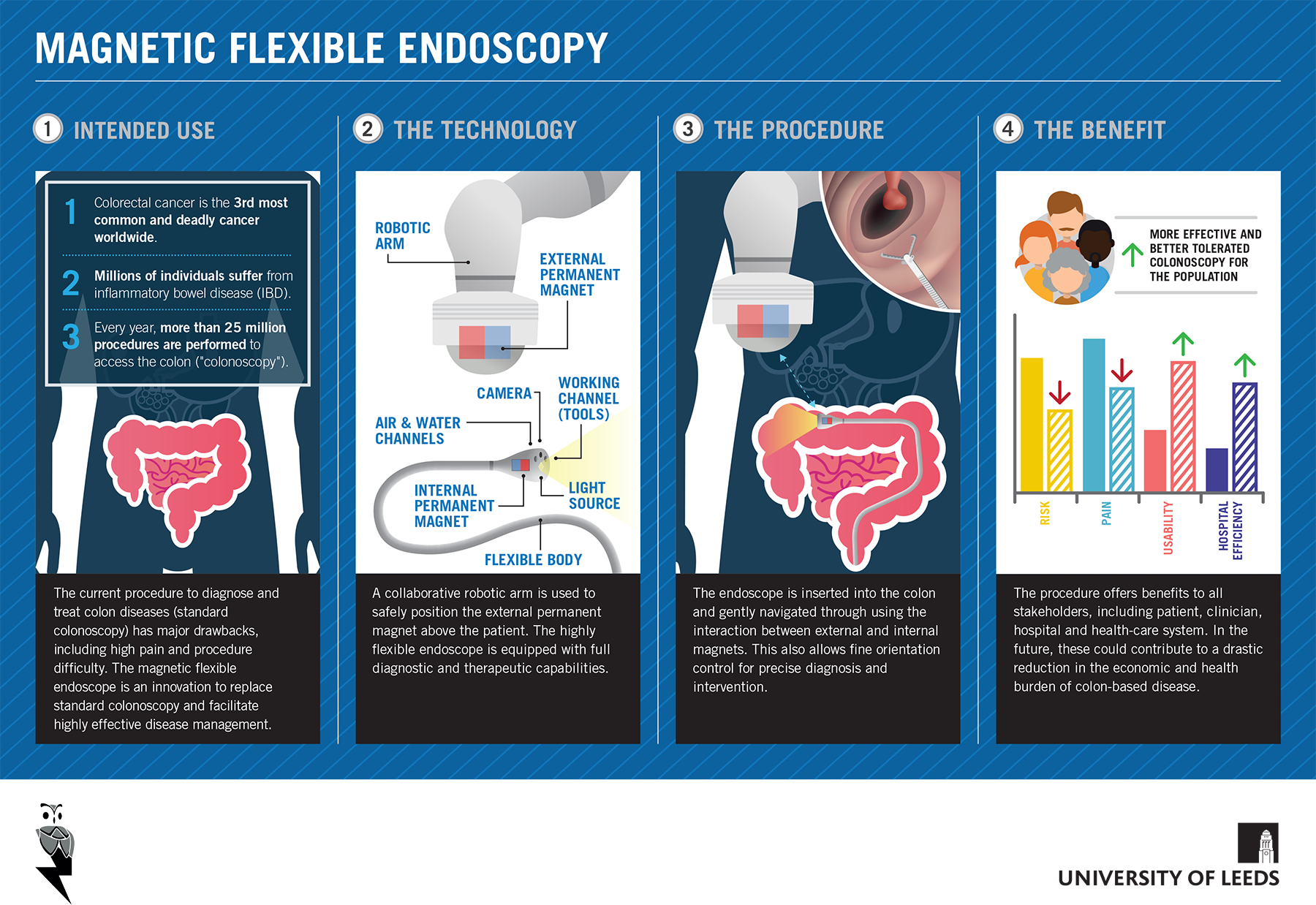
With an aging population increasing the risk of bowel cancer and inflammatory bowel disease on the rise, more than 1 million patients in the UK and 15 million in the US are scheduled for a colonoscopy each year. We are pioneering a new design of endoscope that will enable faster, painless, low cost investigations. Traditional methods of endoscopy can cause discomfort and pain because they are introduced to the colon by pushing the device through the body. The human gut tissue pain receptors are particularly sensitive to stretching, which is an unavoidable effect with the traditional design of endoscope. In the US deep anaesthesia is used for all colonoscopies, which increases cost and risk. In the UK where conscious sedation is preferred, many colonoscopies are not completed because of discomfort to patients, increasing the risk of undiagnosed cancers. The new technology uses a magnetic capsule, with built-in imaging capability, which is propelled forwards through the body by an external magnetic robot arm. The operator uses the camera in the capsule to drive it forward or backwards with a joystick, like driving a car. The joystick makes it easy to learn how to operate the system as it will be familiar to users because it is similar to a gaming console controller. There is currently a long training time to use the complicated controls of traditional endoscopes and a shortage of skilled operators in the UK, which the ease of use of the new technology could alleviate. The system can also be driven autonomously at the touch of a button, with the operator needed only to feed the tube. This will speed up the procedure to around two minutes to reach the end of the colon, enabling the gastroenterologist to use the flexible head of the device to look for cancer as the endoscope is withdrawn. The hope is that faster procedures will mean many more patients can be seen, easing the current waiting times and also that most procedures will be completed. |
Relevant Publications
K. L. Obstein, C. A. Landewee, J. Martin, S. Caló, J. Norton, J. W. Kow, B. Scaglioni, P. Valdastri, “The Magnetic Flexible Endoscope: Phase 1 First in Human Clinical Trial”, American Journal of Gastroenterology, 2025.
Landewee, C. A., Winters, C., Martin, J., Norton, J., Calo, S., Scaglioni, B., Townley, T., Kow, J. W., Valdastri, P., Subramanian, V., & Obstein, K. L. “Magnetic flexible endoscope: a novel platform for diagnostic and therapeutic colonoscopy.” American Society for Gastrointestinal Endoscopy, Vol 3-1, 2024.
Winters, C., Subramanian, V. and Valdastri, P. “Robotic, self-propelled, self-steerable, and disposable colonoscopes: Reality or Pipe Dream? A state of the Art Review,” World Journal of Gastroenterology, 28(35), 2022.
J. Martin, L. Barducci, B. Scaglioni, J. Norton, C. Winters, V. Subramanian, A. Arezzo, K. Obstein and P. Valdastri, “Robotic Autonomy for Magnetic Endoscope Biopsy”, IEEE Transactions On Medical Robotics And Bionics, 2022.
L. Barducci, B. Scaglioni, J. Martin, K. Obstein and P. Valdastri, “Active Stabilization of Interventional Tasks Utilizing a Magnetically Manipulated Endoscope”, Frontiers In Robotics And AI 9, 2022.
O. Onaizah, Z. Koszowska, C. Winters, V. Subramanian, D. Jayne, A.Arezzo, K. L. Obstein, P. Valdastri. “Guidelines for Robotic Flexible Endoscopy at the Time of COVID-19” Frontiers in Robotics and AI, 2021.
A. Mamunes, F. Campisano, J. Martin, B. Scaglioni, E. Mazomenos, P. Valdastri and K. Obstein, “Magnetic flexible endoscope for colonoscopy: an initial learning curve analysis” Endoscopy International Open 09, 2021.
J. Martin, B. Scaglioni, J. Norton, V. Subramanian, A. Arezzo, K. Obstein and P. Valdastri, “Enabling the future of colonoscopy with intelligent and autonomous magnetic manipulation“. Nature Machine Intelligence (2020).
L. Barducci, J. C. Norton, S. Sarker, S. Mohammed, R. Jones, P. Valdastri, B.S. Terry “Fundamentals of the gut for capsule engineers”, Progress in Biomedical Engineering, Vol 2, No 4.
L. Barducci, G. Pittiglio, J. Norton, K. Obstein, P. Valdastri, “Adaptive Dynamic Control for Magnetically Actuated Medical Robots“, IEEE Robotics and Automation Letters, 2019, Vol. 4, No. 4, pp. 3633-3640.
P. R. Slawinski, N. Simaan, K. L. Obstein, P. Valdastri, “Sensorless Estimation of the Planar Distal Shape of a Tip-Actuated Endoscope”, IEEE Robotics and Automation Letters, 2019, IEEE Robotics and Automation Letters, 2019, Vol. 4, No. 4, pp. 3371-3377.
P. R. Slawinski, N. Simaan, A. Z. Taddese, K. L. Obstein, P. Valdastri, “Sensitivity Ellipsoids for Force Control of Magnetic Robots with Localization Uncertainty”, IEEE Transactions on Robotics, 2019, Vol. 35, No. 5, pp. 1123-1135.
G. Pittiglio, L. Barducci, J. W. Martin, J. Norton, C. A. Avizzano, K. Obstein, P. Valdastri, “Magnetic Levitation for Soft-Tethered Capsule Colonoscopy Actuated with a Single Permanent Magnet: a Dynamic Control Approach”, IEEE Robotics and Automation Letters, 2019, Vol. 4, No. 2, pp. 1224-1231.
A. Taddese, P. Slawinski, M. Pirotta, E. De Momi, K. L. Obstein, P. Valdastri, “Enhanced Real-Time Pose Estimation for Closed-Loop Robotic Manipulation of Magnetically Actuated Capsule Endoscopes”, International Journal of Robotics Research, 2018, Vol. 37, No. 8, pp. 890-911.
P. Slawinski, A. Taddese, K. B. Musto, S. Sarker, P. Valdastri, K. L. Obstein, “Autonomously controlled magnetic flexible endoscope for colon exploration”, Gastroenterology, 2018, Vol. 154, No. 6, pp. 1577-1579.
P.R. Slawinski, A. Taddese, K. Musto, K. Obstein, P. Valdastri, “Autonomous Retroflexion of a Magnetic Flexible Endoscope”, IEEE Robotics and Automation Letters, 2017.
C. Di Natali, M. Beccani, N. Simaan, P. Valdastri, “Jacobian-based Iterative Method For Magnetic Localization in Robotic Capsule Endoscopy”, IEEE Transactions on Robotics, 2016, Vol. 32, N. 2, pp. 327-338.
P. R. Slawinski, K. L. Obstein, P. Valdastri, “Capsule Endoscopy of the Future: What’s on the Horizon?”, World Journal of Gastroenterology, 2015, Vol. 21, N. 37, pp. 10528-10541.
P. R. Slawinski, K. L. Obstein, P. Valdastri, “Emerging Issues and Future Developments in Capsule Endoscopy”, Techniques in Gastrointestinal Endoscopy, 2015, Vol. 17, N. 1, pp. 40–46.
P. Valdastri, G. Ciuti, A. Verbeni, A. Menciassi, P. Dario, A. Arezzo, M. Morino, “Magnetic air capsule robotic system: a novel approach for painless colonoscopy”, 19th International Congress of the European Association of Endoscopic Surgery (EAES) in Turin, Italy.
G. Ciuti, M. Salerno, G. Lucarini, P. Valdastri, A. Arezzo, A. Menciassi, M. Morino, P. Dario, “A Comparative Evaluation of Control Interfaces for a Robotic-Aided Endoscopic Capsule Platform”, IEEE Transactions on Robotics, 2012, Vol. 28, N. 2, pp. 534-538.